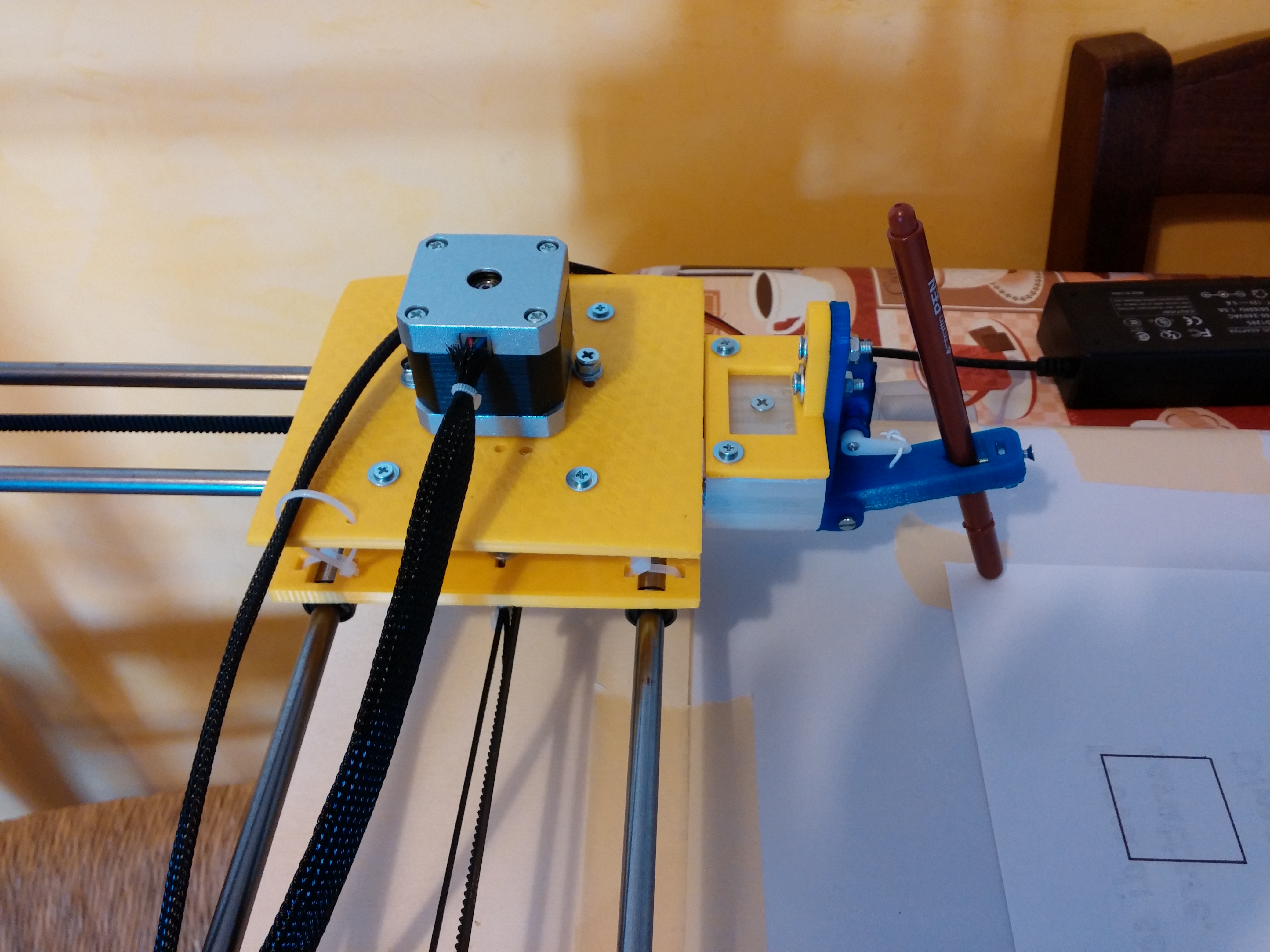
Cartesio – low cost cartesian plotter robot Posted inGRBL , OpenCv , robot drawing , Robottini Recently the famous site evilmadscientist introduced the new art robot called “Axidraw“.I saw the robot in action and it is very similar…