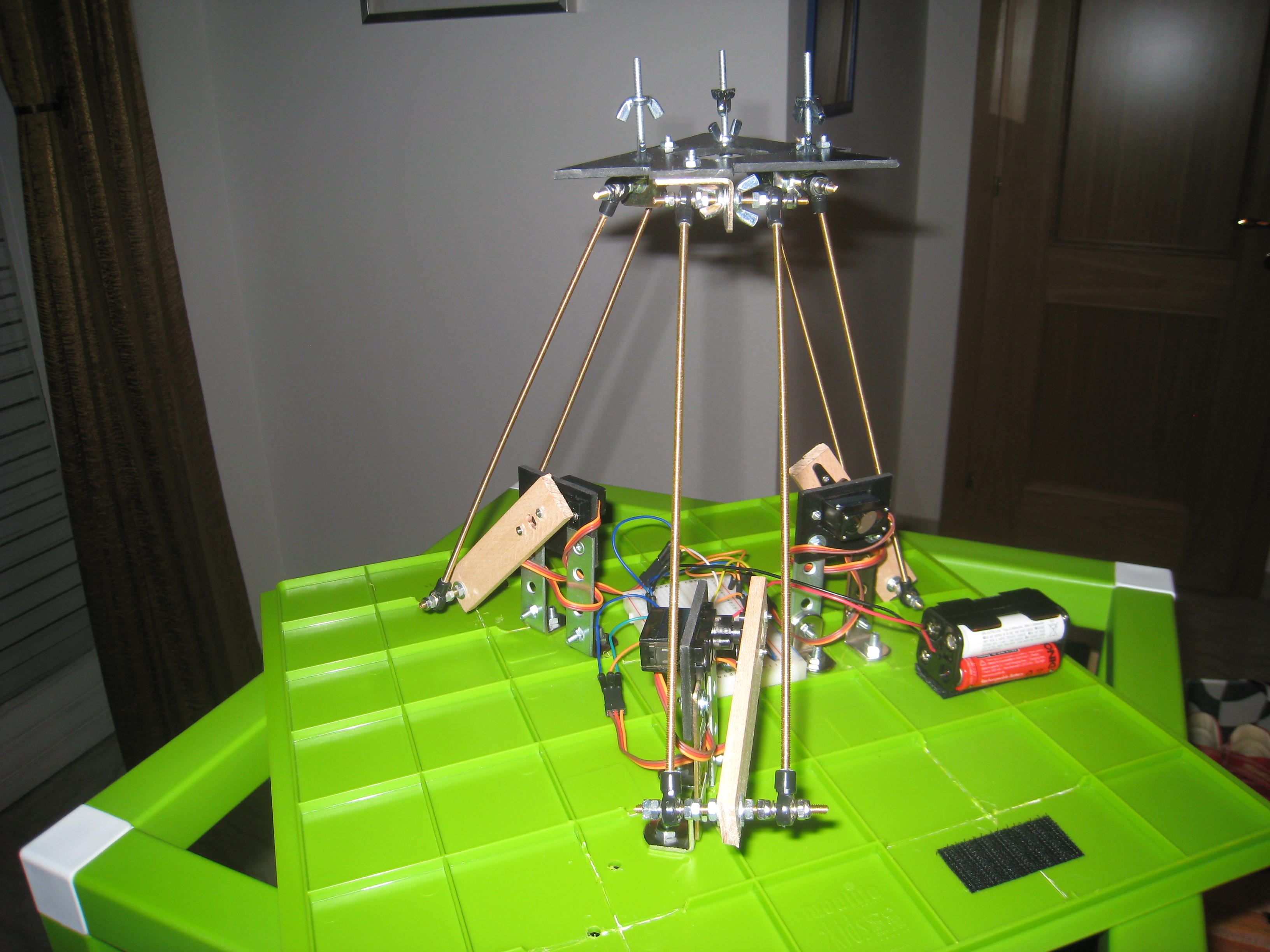
Delta robot with Arduino
Today I present my first Delta robot made with Arduino. The Delta robot structure was designed by a professor at the Technical University of Lausanne in 1985.…

Seamless Theme Primrose, made by Altervista
Create a website and earn with Altervista - Disclaimer - Report Abuse - Privacy Policy - Customize advertising tracking