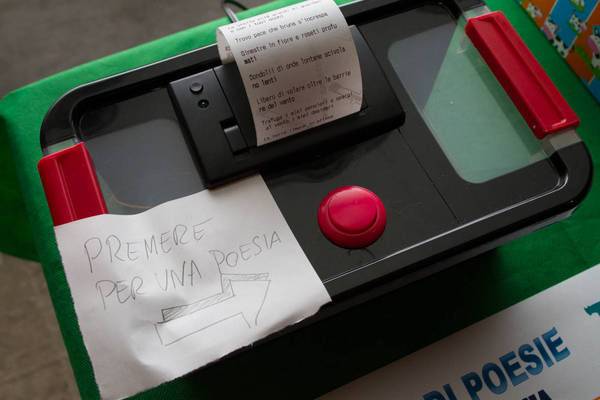
Dadaist poetry box
My second experiment (first is here ) to make Art o something similar with Arduino, is the Dadaist Poetry Box.…

Seamless Theme Primrose, made by Altervista
Create a website and earn with Altervista - Disclaimer - Report Abuse - Privacy Policy - Customize advertising tracking