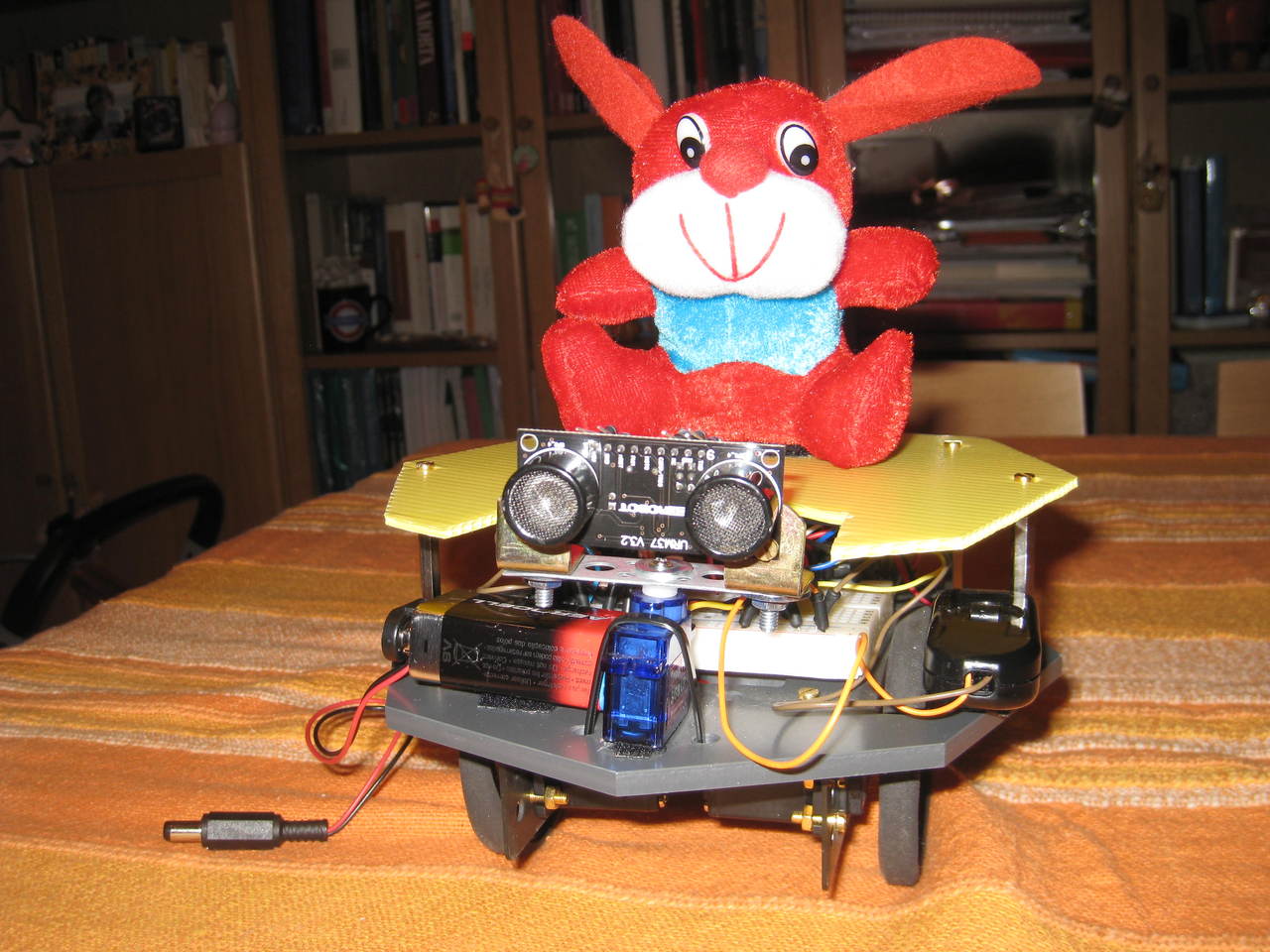
Simple talking robot
Giving the voice to a toy always has been a dream when I was a child. There weren’t talking toys…


Seamless Theme Primrose, made by Altervista
Create a website and earn with Altervista - Disclaimer - Report Abuse - Privacy Policy - Customize advertising tracking